
آخرین مطالب
امکانات وب
دلیل اینکه موقعیت ساقه شیر کنترل پنوماتیک به طور خطی با مقدار فشار هوای اعمال شده به اکچویتور برقی مطابقت دارد این است که فنرهای مکانیکی از قانون هوک پیروی می کنند، جایی که مقدار حرکت فنر (x) مستقیماً با نیروی اعمال شده متناسب است (F = kx). ).
یک اکچویتور برقی پنوماتیک نیرویی را به عنوان تابعی از فشار هوا و ناحیه پیستون/دیافراگم (F = PA) اعمال می کند و فنر به نوبه خود فشرده یا کشیده می شود تا نیروی واکنشی برابر و مخالف ایجاد کند. نتیجه نهایی این است که فشار اکچویتور برقی به صورت خطی به حرکت ساقه سوپاپ تبدیل می شود (x = PA/k).
این رابطه خطی و قابل تکرار بین فشار سیگنال پنوماتیک و موقعیت میل سوپاپ اگر و تنها در صورتی صادق است که دیافراگم/پیستون و فنر تنها نیروهای وارد بر میل سوپاپ باشند. اگر نیروی دیگری بر این مکانیسم وارد شود، رابطه بین فشار سیگنال و موقعیت میل سوپاپ دیگر ایده آل نخواهد بود.
متأسفانه، علاوه بر نیروی اکچویتور برقی و نیروی واکنش فنر، نیروهای دیگری نیز بر روی میل سوپاپ اثر می گذارند.
![]()
اصطکاک ناشی از بسته بندی ساقه یکی از این نیروها است و نیروی واکنشی در پلاگ سوپاپ ناشی از فشار تفاضلی در سراسر ناحیه دوشاخه نیروی دیگری است (یادداشت 1). این نیروها برای قرار دادن مجدد میل سوپاپ توطئه می کنند تا حرکت ساقه دقیقاً با فشار سیال فعال ارتباط نداشته باشد.
نکته 1: یکی از راه های به حداقل رساندن نیروهای دینامیکی بر روی دوشاخه شیر گلوب، استفاده از طرح پلاگین دو پورت یا استفاده از دوشاخه متعادل بر روی شیر گلوب هدایت شده با قفس است. با این حال، یک نقطه ضعف برای هر دو طرح پلاگین سوپاپ، دشواری بیشتر در دستیابی به قطع کردن شدید است.
یک راه حل رایج برای این معضل اضافه کردن یک موقعیت دهنده به مجموعه شیر کنترل است.
![]()
موقعیت دهنده های شیر کنترل
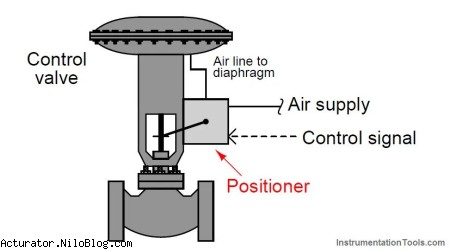
پوزیشنر یک دستگاه کنترل حرکت است که برای مقایسه فعال موقعیت ساقه در برابر سیگنال کنترل، تنظیم فشار به دیافراگم یا پیستون اکچویتور برقی تا رسیدن به موقعیت صحیح ساقه طراحی شده است:
![]()
پوزیشنرها اساساً به عنوان سیستم های کنترل در درون خود عمل می کنند (یادداشت 2): موقعیت ساقه سوپاپ، متغیر فرآیند (PV)، سیگنال فرمان به موقعیت دهنده، نقطه تنظیم (SP) و سیگنال موقعیت دهنده به اکچویتور برقی سوپاپ، متغیر دستکاری شده است. (MV) یا خروجی.
بنابراین، هنگامی که یک کنترل کننده فرآیند یک سیگنال فرمان را به یک شیر مجهز به پوزیشنر می فرستد، پوزیشنر سیگنال فرمان را دریافت می کند و فشار هوا را به همان اندازه یا کمتر به اکچویتور برقی اعمال می کند تا به موقعیت پایه دلخواه برسد.
بنابراین، پوزیشن گر با هر نیروی دیگری که بر روی میل سوپاپ وارد می شود «مبارزه» می کند تا بر اساس سیگنال فرمان به موقعیت دقیق و دقیق میل دست یابد. یک موقعیت ساز که به درستی کار می کند، اطمینان می دهد که شیر کنترل «خوب رفتار می کند» و از سیگنال فرمان اطاعت می کند.
نکته 2: اصطلاح فنی برای این نوع سیستم کنترل آبشاری است که در آن خروجی یک کنترل کننده به نقطه تنظیم برای یک کنترل کننده دیگر تبدیل می شود.
در مورد پوزیشنر سوپاپ، پوزیشنر یک نقطه تنظیم موقعیت ساقه سوپاپ را از کنترل کننده فرآیند اصلی دریافت می کند. می توان گفت که کنترل کننده فرآیند اصلی در این مورد، کنترل کننده اصلی یا اصلی است، در حالی که موقعیت دهنده سوپاپ، کنترل کننده ثانویه یا slave است.
![]()
عکس زیر یک پوزیشنر پنوماتیک فیشر مدل 3582 را نشان می دهد که بر روی یک شیر کنترل نصب شده است. پوزیشنر جعبه خاکستری رنگ با سه فشارسنج در سمت راست آن است:

![]()
در سمت چپ این پوزیشنر ممکن است بخشی از مکانیسم بازخورد دیده شود: یک بست فلزی که به رابط میل سوپاپ پیچ شده است، و به بازویی که از سمت پوزیشنر خارج می شود متصل می شود.
هر موقعیت دهنده شیر کنترلی باید به وسیله ای مجهز باشد تا موقعیت میل سوپاپ را حس کند، در غیر این صورت موقعیت گیر نمی تواند موقعیت میل سوپاپ را با سیگنال فرمان مقایسه کند.
![]()
پوزیشنر مدرن تری در عکس بعدی، Fisher DVC6000 ظاهر می شود (دوباره جعبه خاکستری رنگ با فشار سنج در سمت راست آن):
![]()
مانند پوزیشنر 3582 مدل قدیمی، این مدل DVC6000 از یک اتصال بازخورد در سمت چپ برای تشخیص موقعیت میل سوپاپ استفاده می کند. حتی مدل جدیدتر DVC6200 از سنسور اثر هال مغناطیسی برای تشخیص موقعیت آهنربای پیچ شده به میل سوپاپ استفاده می کند.
این طراحی بازخورد موقعیت غیرمکانیکی واکنش، سایش، تداخل و سایر مشکلات احتمالی مرتبط با پیوندهای مکانیکی را حذف می کند. بازخورد بهتر برای موقعیت بهتر سوپاپ ضروری است.
موقعیت دهنده های شیر کنترل معمولاً به گونه ای ساخته می شوند که نرخ جریان هوای بالایی را منبع و تخلیه کنند، به طوری که موقعیت دهنده عملکرد تقویت کننده حجم را نیز انجام می دهد (یادداشت 3).
بنابراین، یک پوزیشنر نه تنها موقعیت دقیق تر میل سوپاپ را تضمین می کند، بلکه سرعت ساقه سریع تر (و تأخیرهای زمانی کوتاه تر) را نسبت به زمانی که اکچویتور برقی شیر مستقیماً توسط مبدل I/P "تغذیه می شود" را تضمین می کند.
نکته 3: این بدان معنا نیست که پوزیشنرهای سوپاپ نیازی به تقویت کننده های حجم خارجی ندارند، فقط ظرفیت جریان هوای فعال یک پوزیشنر معمولی بسیار بیشتر از ظرفیت جریان هوای یک مبدل I/P معمولی است.
![]()
مزیت دیگر افزودن پوزیشنر به شیر کنترلی که به صورت پنوماتیکی فعال می شود، نشیمنگاه برتر سوپاپ (خاموش محکم) است. این مزیت در بررسی اول آشکار نیست، و بنابراین توضیحی لازم است.
اول، باید درک کرد که تماس صرف بین دوشاخه و نشیمنگاه در یک دریچه ساقه کشویی برای اطمینان از بسته شدن محکم کافی نیست. در عوض، دوشاخه باید به شدت روی صندلی فشار داده شود تا به طور کامل تمام جریان از طریق شیر بسته شود.
هرکسی که تا به حال دستگیره شیلنگ نشتی را سفت کرده باشد به طور مستقیم این اصل را درک کرده است: مقدار معینی از نیروی تماس بین دوشاخه و صندلی برای تغییر شکل جزئی و در نتیجه قالب گیری آن دو جزء به یک سیال کامل ضروری است. - تناسب تنگ اصطلاح فنی برای این نیاز مکانیکی بار صندلی است.
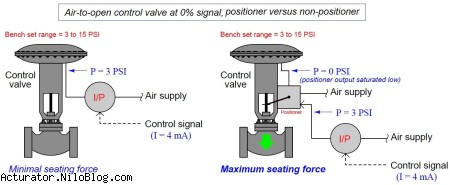
تصور کنید که یک شیر کنترلی با دیافراگم، ساقه کشویی و هوا به باز با محدوده 3 تا 15 PSI تنظیم می شود.در فشار اعمالی اکچویتور برقی 3 PSI، دیافراگم نیروی کافی برای غلبه بر نیروی پیش بار فنر اکچویتور برقی ایجاد می کند، اما نیروی کافی برای جابجایی دوشاخه از روی صندلی وجود ندارد.به عبارت دیگر، در فشار دیافراگم 3 PSI، دوشاخه صندلی را لمس می کند، اما با نیروی کم یا بدون نیروی برای ایجاد یک مهر و موم بسته محکم.اگر این شیر کنترلی مستقیماً توسط یک مبدل I/P با محدوده کالیبره شده 3-15 PSI تغذیه شود، به این معنی است که شیر به سختی با مقدار سیگنال 0٪ (3 PSI) بسته می شود تا کاملاً خاموش شود.
برای اینکه به طور کامل دوشاخه سوپاپ را بر روی صندلی سوپاپ فشار دهید تا به یک مهر و موم محکم برسد، تمام فشار هوا باید از دیافراگم خارج شود تا اطمینان حاصل شود که هیچ نیروی دیافراگمی مخالف فنر نیست. این امر با یک I/P با محدوده کالیبره شده 3-15 PSI غیرممک
حال تصور کنید که دقیقاً همان شیر مجهز به یک پوزیشنر، سیگنال 3-15 PSI را از I/P گرفته و از آن به عنوان یک فرمان (تنظیمی) برای موقعیت میل سوپاپ استفاده می کند و به همان اندازه یا کمتر فشاری را که لازم است به دیافراگم وارد می کند. به موقعیت ساقه دلخواه برسید.
کالیبراسیون مناسب موقعیت دهنده به گونه ای است که میل سوپاپ شروع به بلند شدن نمی کند تا زمانی که سیگنال کمی بالاتر از 0٪ باشد، به این معنی که در 0٪ (4 میلی آمپر) پوزیشنر سعی می کند شیر را به موقعیت ساقه کمی منفی وادار کند.
در تلاش برای دستیابی به این تقاضای غیرممکن، خروجی پوزیشنر کم اشباع می شود و هیچ فشاری به دیافراگم اکچویتور برقی وارد نمی کند و در نتیجه نیروی فنری کامل توسط دوشاخه بر روی صندلی اعمال می شود.
مقایسه این دو سناریو در اینجا نشان داده شده است:
![]()
در حالی که پوزیشنرها در اکچویتور برقی های سوپاپ مجهز به فنر مفید هستند، اما برای برخی از سبک های دیگر اکچویتور برقی ها کاملا ضروری هستند.
اکچویتور برقی پیستونی پنوماتیکی دوکاره زیر را که فنر ندارد در نظر بگیرید:
![]()
بدون فنری که نیروی بازدارنده ای برای بازگرداندن شیر به موقعیت «ایمن از خرابی» ایجاد می کند، هیچ رابطه ای با قانون هوک بین فشار هوا اعمال شده و موقعیت ساقه وجود ندارد. یک پوزیشنر باید به طور متناوب فشار هوا را به هر دو سطح پیستون اعمال کند تا میل سوپاپ را بالا و پایین کند.
اکچویتور برقی های شیر کنترل الکتریکی کلاس دیگری از طراحی اکچویتور برقی هستند که کاملاً به نوعی سیستم موقعیت دهنده نیاز دارند، زیرا یک موتور الکتریکی از موقعیت محور خود آگاه نیست تا بتواند دقیقاً یک شیر کنترل را حرکت دهد.
بنابراین، یک مدار موقعیت دهنده با استفاده از یک پتانسیومتر یا حسگر LVDT/RVDT برای تشخیص موقعیت میل سوپاپ و مجموعه ای از خروجی های ترانزیستور برای به حرکت درآوردن موتور لازم است تا یک اکچویتور برقی الکتریکی به سیگنال کنترل آنالوگ پاسخ دهد.
![]()
برای خرید این محصول می توانید با شماره های زیر تماس یگیرید:
86031739-86047201-09128446731
acturator...
ما را در سایت acturator دنبال میکنید
برچسب: پوزیشنر , اکچویتور برقی , شیر کنترل,
نویسنده: علی حیدری
بازدید: 162